
| 电话:13691406546(微信) | ||
| 客服: |

|
|
水下机器人(ROV/AUV)
AUV
ROV
AUV/ROV 开发系统
ROV模拟培训系统
水下推进器
水下机械手
ROV/AUV可搭载传感器

|
水下航行器 YUCO-AUV |
成本低; 重量轻体积小布放简单; 可搭载 DVL CTD 多参数侧扫声纳; |
水下地形测绘; 水下环境的物理监测和调查; 海洋栖息地、珊瑚礁和海草的监测; |

|
水下航行器 LAUV |
工作水深100m; 3节航速下可工作8小时; 可搭载DVL 侧扫声纳 CTD 多参数等传感器; |
水下测量; 海洋测绘; 水下搜索; |

|
水下机器人 DY8T-ROV |
工作水深100米; 高清1080P摄像头; 岸基供电,可长时间水下作业; |
水下拍摄; 水下作业搜救打捞; 水下取样探测; |
|
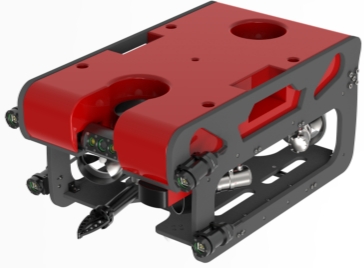
Smart8T Max水下机器人 |
工作水深300米; 800W像素4K分辨率; 配置8个600w功率推进器; |
水下检测环境调查; 水下拍照录像搜索打捞; 搭载机械手探测成像声呐; |

|
水下机器人V8 M500 ROV |
工作水深500米; 具备在任意维度360度旋转的能力; 稳定性强; |
水下检测环境; 水下作业; |
|
AUVSim |
AUV/UUV/ROV开发、仿真系统; 真实的六自由度仿真; 环境模型包括潮汐、涌浪; 可以进行实体仿真,具有多种接口; 3D外部视图、海图视图 |
AUV/ROV开发前仿真,确保系统的成功率; 系统开发后进行实体仿真,优化系统配置; 提供丰富的控制硬件板卡; 提供AUV、ROV外部选件 |

|
SPECTRE自动驾驶仪控制板 |
多种控制模式; 支持多种命令、控制接口; 远程控制功能 |
用于水面船只控制; 水下潜器控制; 空中飞艇控制 |

|
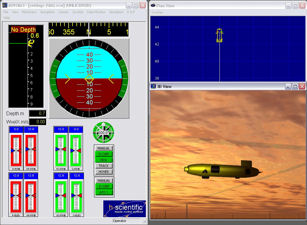
VROV仿真系统 |
支持标准组件和环境影响; 根据任务配置ROV; 齐全的工作任务包 |
用于ROV操作员仿真训练 |

|
DY水下推进器 |
各种型号和尺寸的的水下推进器; 不同的推力组合; |
AUV ROV可加载; |

|
Tecnadyne水下推进器系列 |
直流无刷推进器; 涵盖各种型号及尺寸的水下推进器; 不同的推力组合全方位满足用户需求 |
ROV推进器; AUV推进器 |
|
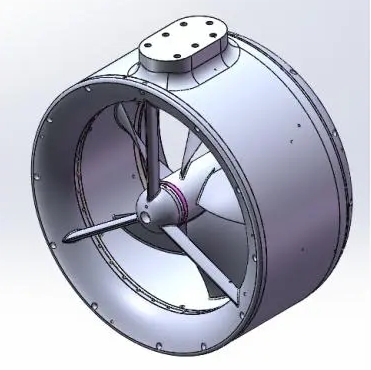
轮缘推进器 |
易维护,维护保养成本低; 防水、耐盐水; 电机高扭矩、响应快速; 兼容性高; |
适用于AUV、ROV; 设计轻巧、 节约空间; |
|
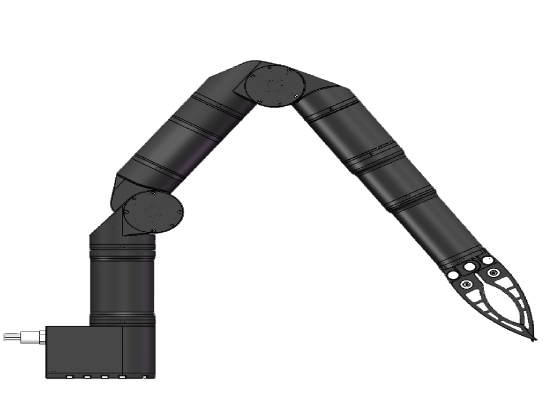
水下电动机械手 | 2-6个自由度; 最大负载2.5kg; | 轻巧方便,适用于水下机器人加载; 主手控制,方便操控; |

|
Cygnus金属测厚仪系列 |
配套PC软件; 超声波测量; 结构紧凑,使用简单 |
可在空气中测量或水中测量 |
|
水下激光尺度仪 | 激光测距仪用来提供两个间距已知的激光参考点,这两个参考点可以用来评估通过摄像头看到的目标大小,也可以安装四个激光单元来更加准确的对目标尺寸进行评估。 | 光波长: 650nm ROV加载; 和摄像头搭配使用; |